本文来源于:剑指工控 李振
01.硬件及软件版本
客 户 端 :S7-1200
软 件 :TIA V15
CPU:1214C
Firmware:4.2
IP 地 址 :192.168.1.9
255.255.255.0
0.0.0.0
端口号:0
硬件标识符:64
硬件标识符是在“设备组态”中,双击 PROFINET 接口,然后在“属性”中的“硬件标识符”中查看。


02.ATV340 参数设置
配置完成后,ATV340 需完全断电后重启。
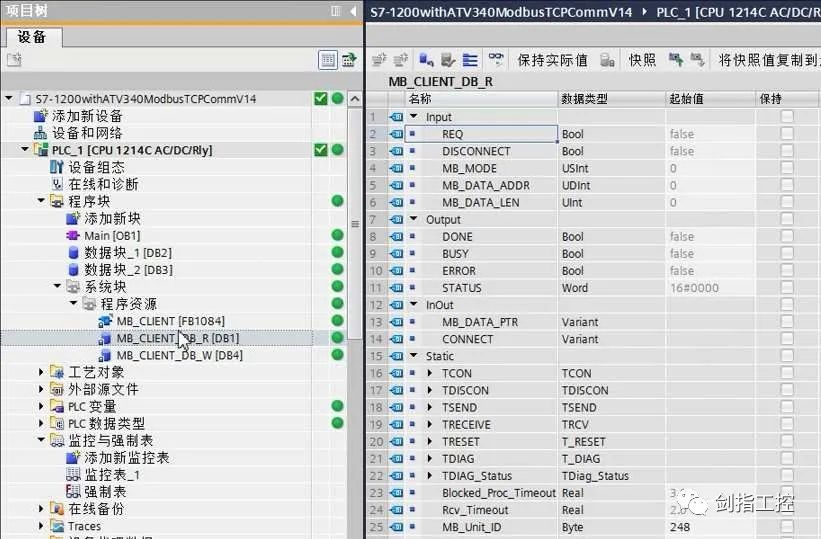
03.S7-1200 PLC 配置
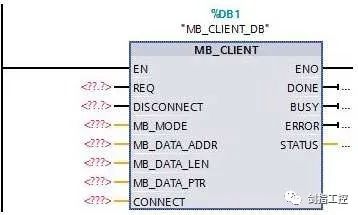
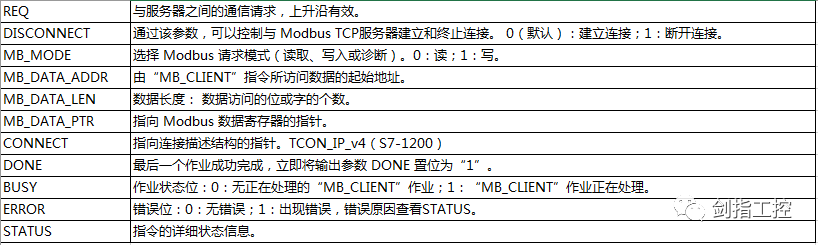
S7-1200 客户端侧需要调用 MB_CLIENT 指令块,该指令块主要完成客户机和服务器的TCP 连接、发送命令消息、接收响应以及控制服务器断开的工作任务。
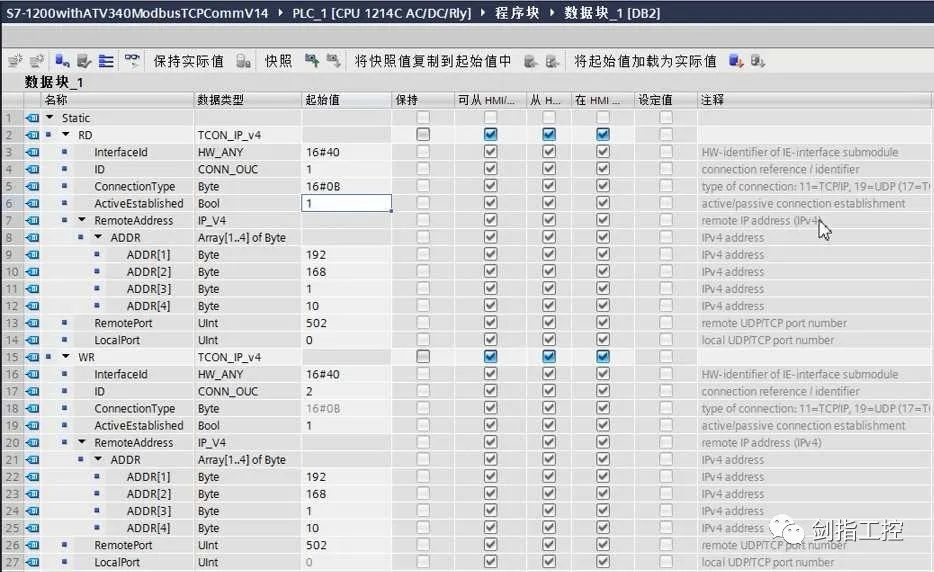
2、CONNECT 指针类型
(1)创建一个新的全局数据块 DB2。

(2)双击打开新生成的 DB 块, 定义变量名称为“WR" 与“RD” , 数据类型为“TCON_IP_v4”,然后点击“回车”创建完毕。

3、创建MB_DATA_PTR 数据缓冲区
(1)创建一个全局数据块DB3。

(2)建立一个数组的数据类型,在通信中读写数据使用。

(3)修改 DB3 的属性,取消优化的块访问。
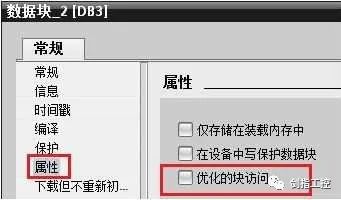
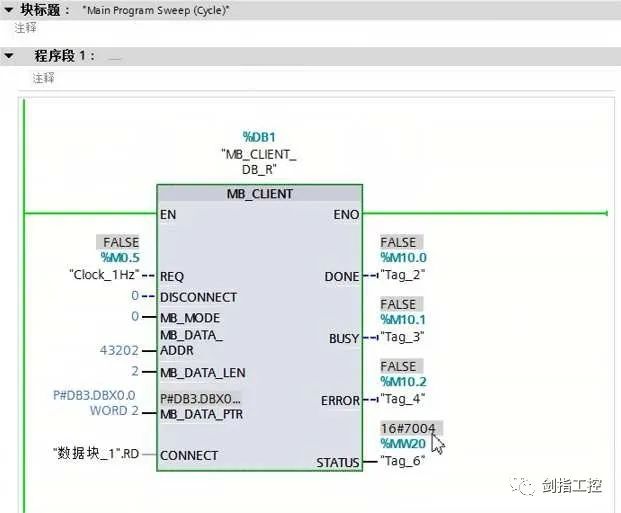
MB_DATA_PTR 指定的数据缓冲区可以为 DB 块或 M 存储区地址中。DB 块可以为优化的数据块,也可以为标准的数据块结构。若为优化的数据块结构,编程时需要以符号寻址的方式填写该引脚;若为标准的数据块结构(可以右键单击 DB 块,“属性”中将“优化的块访问”前面的勾去掉),需要以绝对地址的方式填写该引脚。本例以标准的数据块(默认) 为例进行编程。
取消勾选优化的块访问时,寻址方式为P#DB3.DBX0.0 WORD 2(起始位,数据类型,数量)。
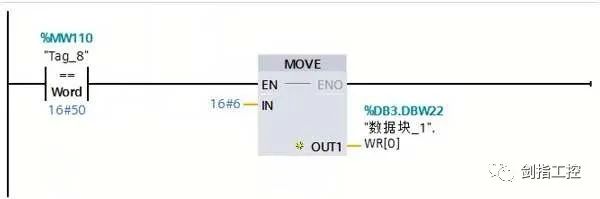
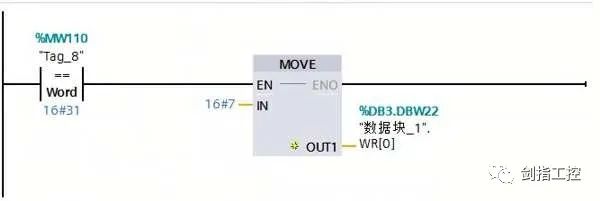
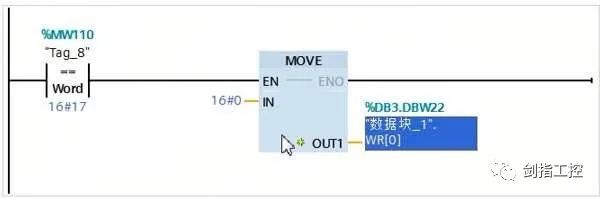
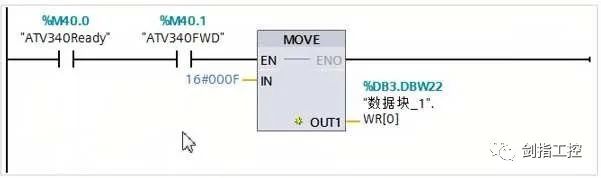
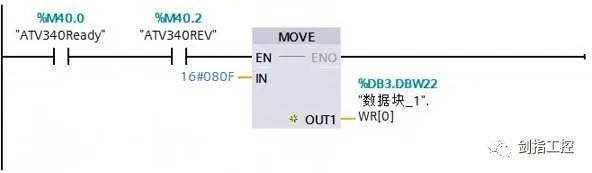
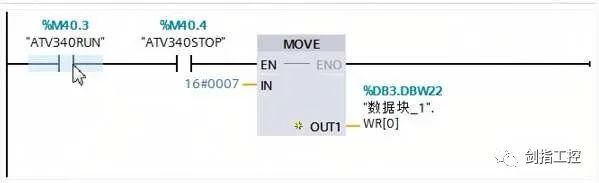
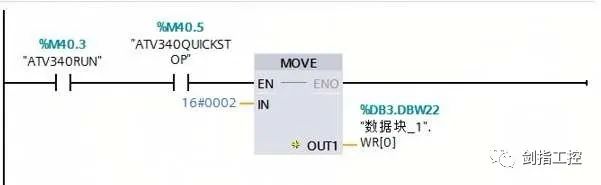
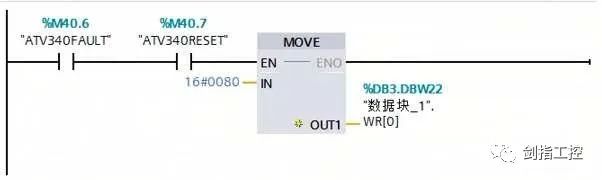
写操作,本例中写入 ATV340 的 8501 与 8502 两个寄存器。
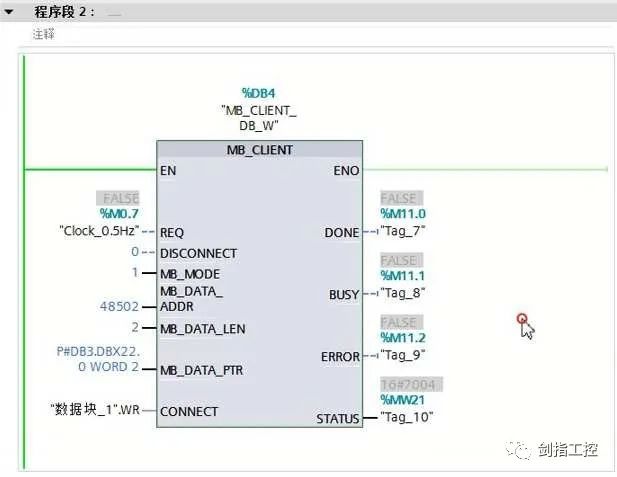
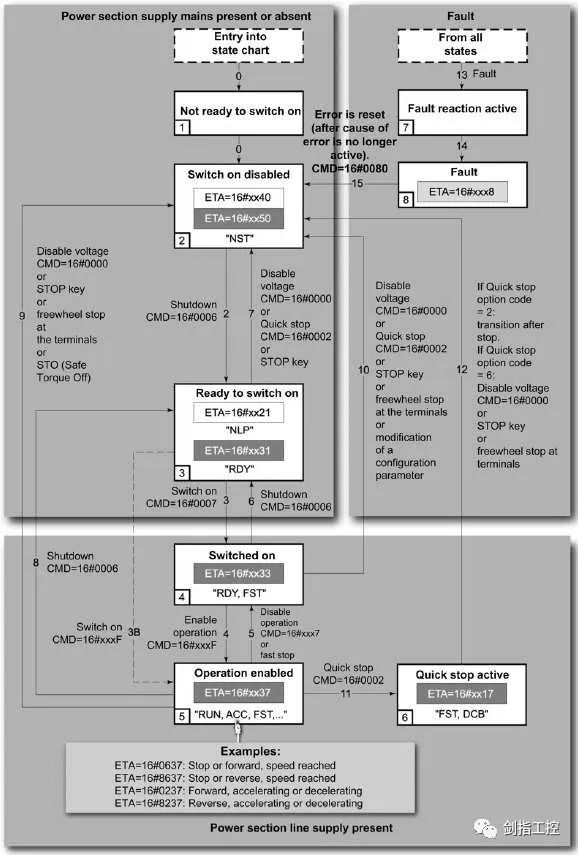
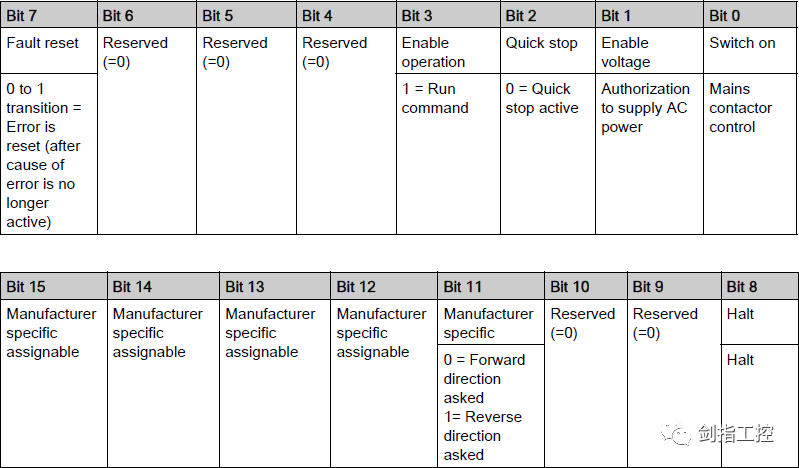
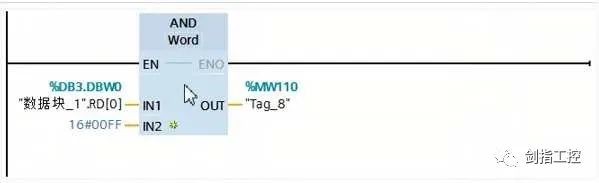
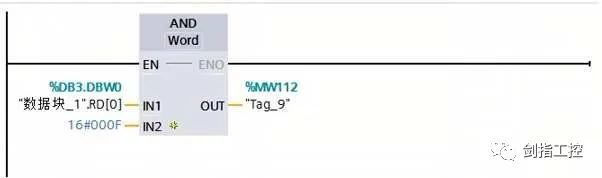
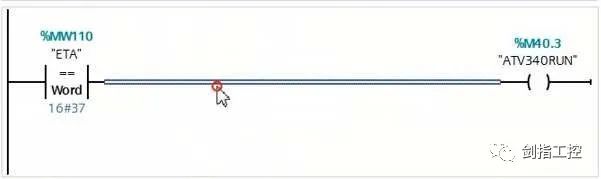
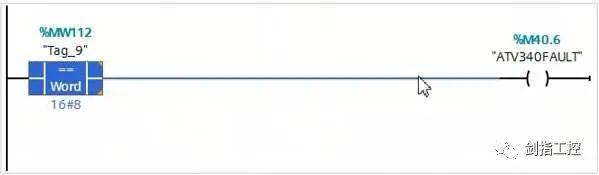
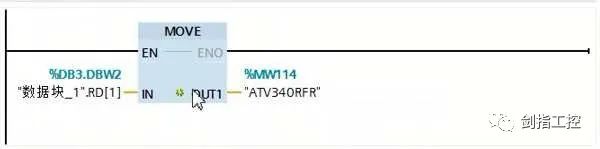
ATV340 变频器采用 DriveCom 控制流程,通过 ETA 状态字(通信地址为 3201)读取ATV340 的状态,通过 RFR 输出频率字(通信地址为 3202)读取 ATV340 的输出频率;通过CMD 命令字(通信地址为 8501)控制 ATV340 的状态转换,通过 LFR 设定频率字(通信地址为 8502)写入 ATV340 的设定频率。



下一篇:食品饮料行业IoT解决方案
服务热线:0371-60298207 13383812899
公司传真:0371-60298207
公司邮箱:nhauto@hnnhauto.com
公司地址:河南省新郑市薛店镇中德产业园47-4号楼
 官方微信公众号
官方微信公众号