本文来源于:施家邦 工控邦
Q1.LXM26/28系列伺服支持哪些控制方式?
LXM26系列伺服支持PTI控制,Modbus控制,模拟量控制,以及端子控制。
LXM28系列伺服在LXM26系列伺服的基础上增加了CANopen,Ethercat以及Sercos控制,LXM28E和S系列伺服不支持PTI控制,模拟量和端子控制。
Q2.LXM26/28系列伺服支持哪些运行模式?
LXM26系列伺服支持脉冲模式PT,内部任务模式PS,速度模式V,转矩模式T,内部速度模式VZ,内部转矩模式TZ以及双模式切换
LXM28A系列伺服除支持上述运行模式外,还支持CANopen运行模式,其中CANopen运行模式包含以下子模式:
·Profile Position
·Profile Velocity
·Profile Torque
·Homing
·Interpolated Position
·Cyclic Synchronous Position
·Jog
·Electronic Gear
·Analog Velocity
·Analog Torque
LXM28E系列伺服只支持Ethercat运行模式,其中包含以下子模式:
·Jog
·Profile Position
·Profile Velocity
·Profile Torque
·Profile Homing
·Interpolation
·Cyclic Synchronous Position
·Cyclic Synchronous Velocity
·Cyclic Synchronous Torque
LXM28S系列伺服只支持Sercos3运行模式,其中包含以下子模式:
·Profile Homing
·Cyclic Synchronous Position
·Cyclic Synchronous Velocity
·Cyclic Synchronous Torque
Q3.LXM26/28系列伺服出现零点漂移如何处理?
我们在使用模拟量或脉冲控制LXM26/28系列伺服时,有时候会发现使能之后,未给任何命令,伺服会缓慢运动,此现象称为零点漂移,处理零点漂移有两种方法:
1. PT模式时,将脉冲方式从脉冲/方向改为CW/CCW模式
2.设置零漂抑制,设定P1-38参数略大于缓慢运行的速度(P1-38单位为RPM),在DI1-DI8中找一个未使用的点,将其设置为5(ZCLAMP),重启之后即可抑制零漂。
Q4.LXM26/28系列伺服电子齿轮比如何计算?
LXM26/LXM28A系列伺服PT模式电子齿轮比设置参数为P1-44和P1-45,计算方法为(1280000/P1-44)*P1-45,以默认参数为例,1280000/128*10=100000,表示PLC给100000个脉冲伺服运行一圈,速度为1转每秒,即60RPM。
LXM28A,LXM28E系列伺服使用通讯模式控制时无法通过面板修改电子齿轮比,必须通过通讯配置修改CANopen索引6091和6092的值来修改(LXM28E的Ehercat是基于CANopen协议,所以也可以参考CANopen索引地址),具体算法如下:
分辨率 = (6092:1h / 6092:2h) x (6091:1h / 6091:2h)
|
单位尺寸 |
示例 |
|
位置单位 |
假设: ·6091:1h = 360 ·6091:2h = 1 ·6092:1h = 1 ·6092:2h = 1 实际位置读数 = 720 则: 720/[(360/1)x(1/1)]=2转 |
|
速度单位 |
假设: ·6091:1h=360 ·6091:2h=1 ·6092:1h=1 ·6092:2h=1 实际位置读数=720 则: 720/[(360/1)x(1/1)]=2转/秒 |
|
加速度单位 |
假设: ·6091:1h=360 ·6091:2h=1 ·6092:1h=1 ·6092:2h=1 实际位置读数=720 则: 720/[(360/1)x(1/1)]=2转/秒2 |
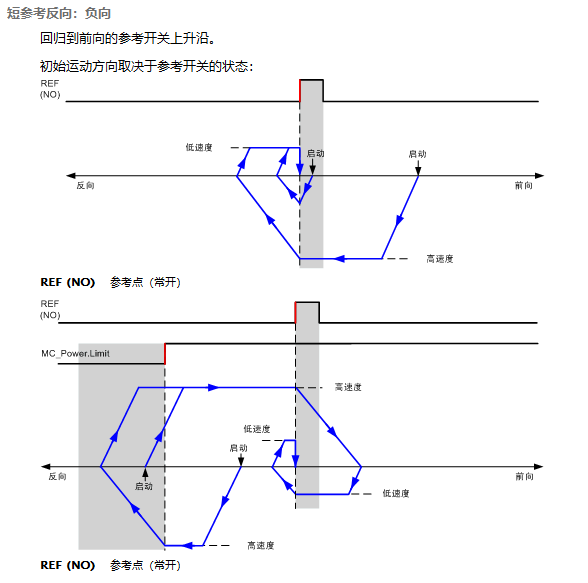
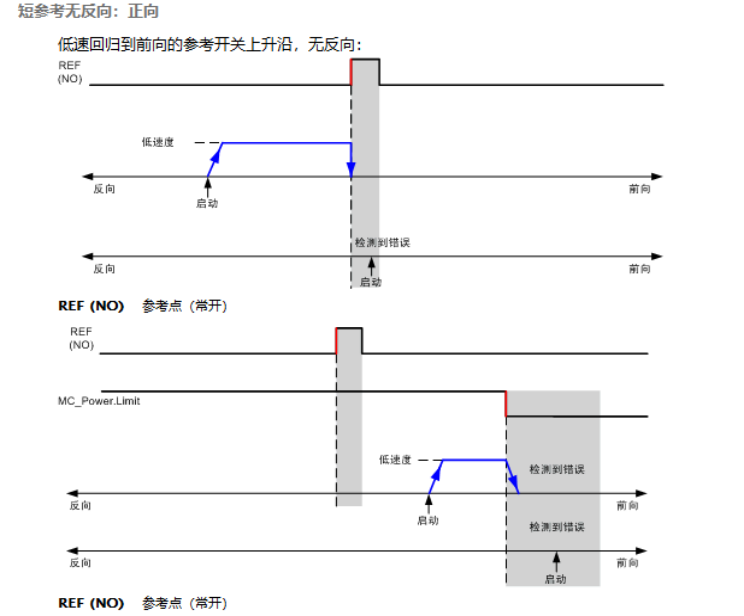
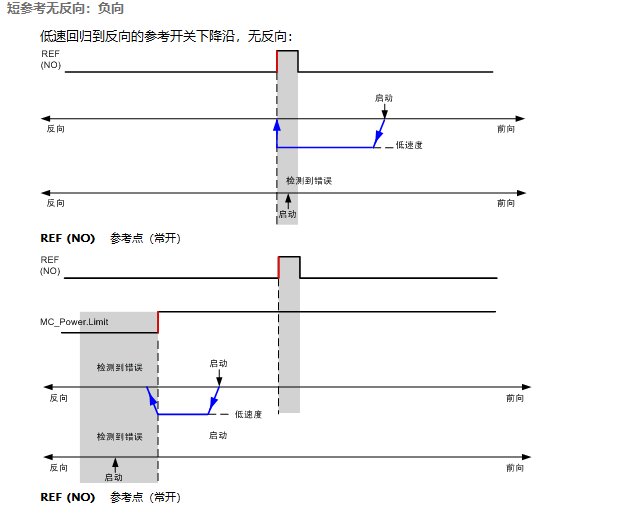
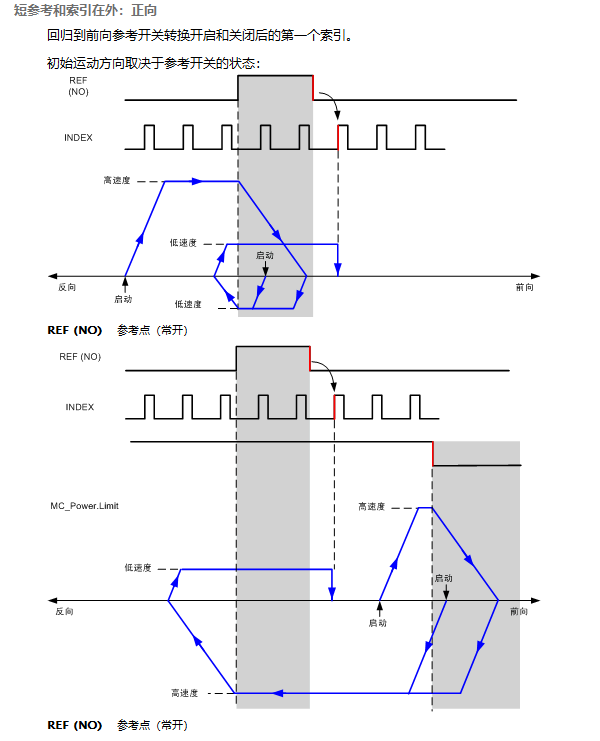
Q5.TM241使用PT模式控制LXM26/28伺服支持哪些回零方式?
伺服驱动器在PT模式下,回零模式取决于PLC,伺服作为执行元件执行PLC发出的回零逻辑,以TM241为例,支持以下回零模式:
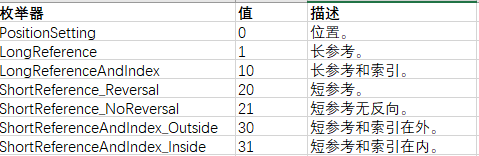
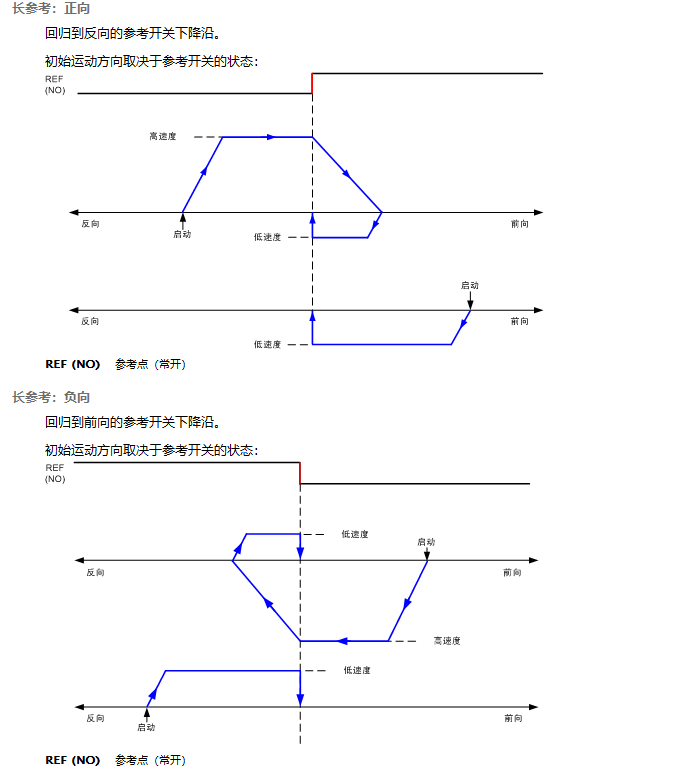
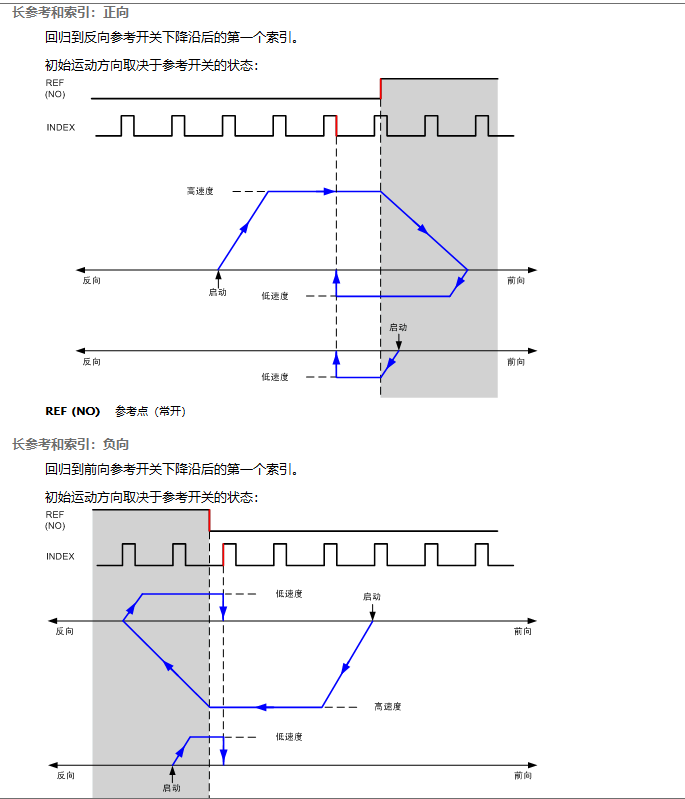
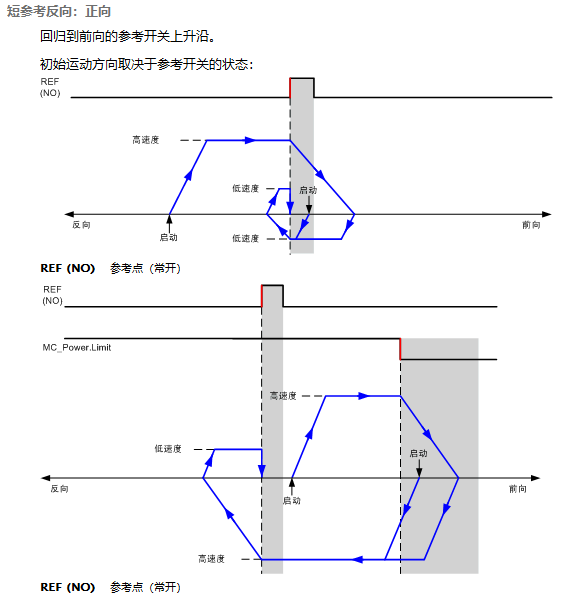
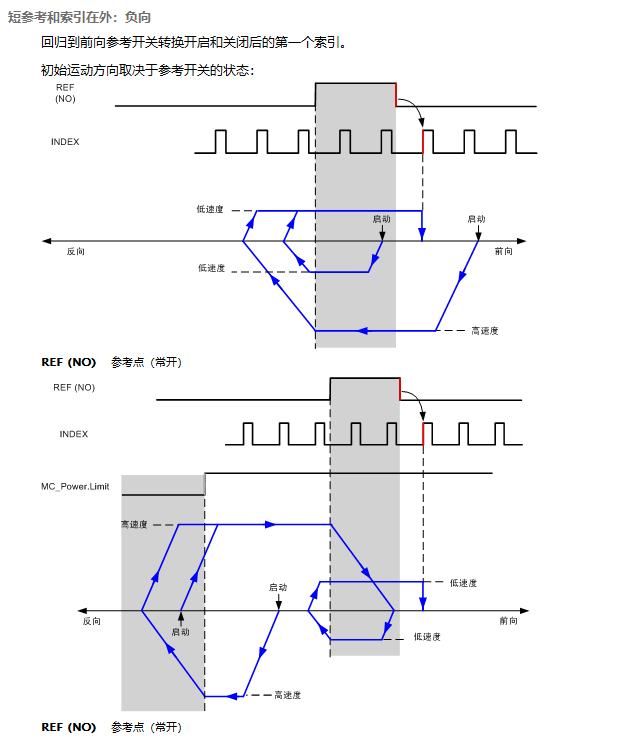
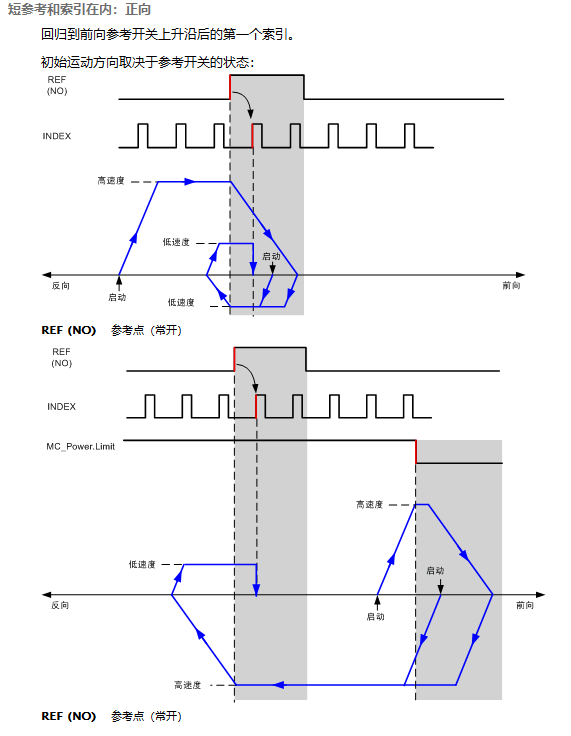
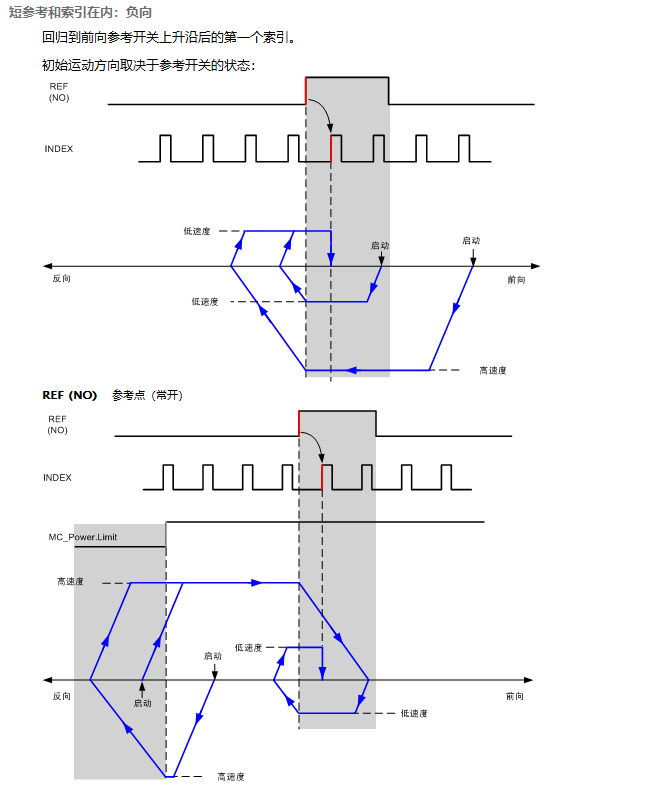
具体回零时序逻辑如下:
0:位置——在位置设置情况下,当前位置设置为指定的位置值。不执行任何移动。
1:长参考
10:长参考和索引
20:短参考反向
21:短参考无反向
30:短参考和索引在外
31:短参考和索引在内
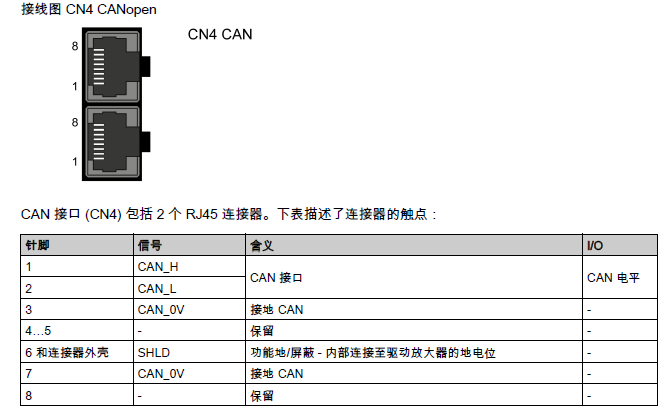
Q6.LXM28A系列伺服的CANopen接口引脚如何定义?
LXM28A伺服CAN接口(CN4)包括2个RJ45连接器。下表描述了连接器的触点:
Q7.LXM26/28系列伺服如何自整定?
LXM26/28系列伺服可以使用面板或SoMove软件进行自整定,可以支持轻松自整定,舒适自整定和手动整定参数
·轻松整定:无需使用者参与的自动整定。在大多数的应用场合,轻松调整都可以提供良好的和动态的结果。
·舒适整定:自动整定在用户的支持下执行。您可以选择优化标准并设置运动、方向和速度的参数。
·手动整定:在手动整定时可以执行测试运动,并通过示波器功能来优化控制环。
需要注意,目前1.75以上版本,当P8-35=0X4001时,无法使用自整定,只有当P8-35=0X207时才能使用自整定,通常使用轻松自整定即可完成绝大部分应用,具体面板操作如下:
将参数P2-32设为1,以执行轻松整定。
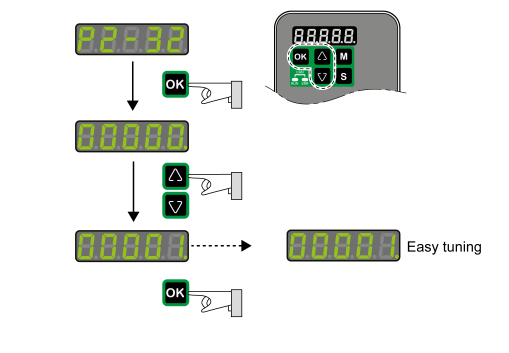
在您通过P2-32开启轻松整定之后,进度会以tn000到tn100的百分比显示在HMI显示器上。
按HMI上的M键可中断自动调整。
自动调整成功完成后会在HMI显示器上显示done。
按HMI上的OK键可储存控制电路参数的值。HMI显示器会显示saved。
按HMI上的M键可摒弃自动调整的结果。
如果自动调整未能成功运行,HMI显示器上会显示ERROR。通过参数P9-30可确定原因。
参数P9-37提供在自动调整中最后一次出现的事件的更多信息。
需要注意,轻松整定需要总共5圈的运动范围,在轻松整定时,将从当前电机位置朝正方向转动2.5圈并朝负方向转动2.5圈。若相应的运动范围不可用,则应使用舒适整定。
Q8.LXM26/28系列伺服使用SoMove联机需要注意什么?
硬件:
联机电缆。型号为TCSMCNAM3M002P,此电缆一端为RJ45水晶头,用于连接伺服端的CN3端口,一端为A型USB接头,用于连接电脑。
软件:
SoMove软件:
https://www.se.com/ww/en/download/document/SoMove_FDT/
LXM26/28DTM:
https://www.se.com/ww/en/download/document/LXM28ADTMLbrary/
Q9.LXM26/28系列伺服如何设定上电使能?
LXM26/28上电使能用两种方法:
1. 设定P2-30=1,此时伺服立即使能,无需重新上电,但断电再上电后使能信号丢失,且P2-30恢复为0,需要重新设定。
2. 设定P2-10=1,P2-68=1,断电再上电后伺服自动处于使能状态。
Q10.LXM26/28系列伺服如何修改运行方向?
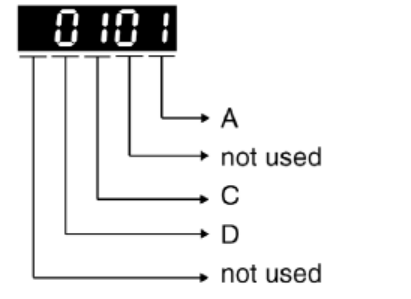
如果在运行时发现伺服电机方向和实际方向相反,可以修改伺服P1-01参数的C位来修改运行方向
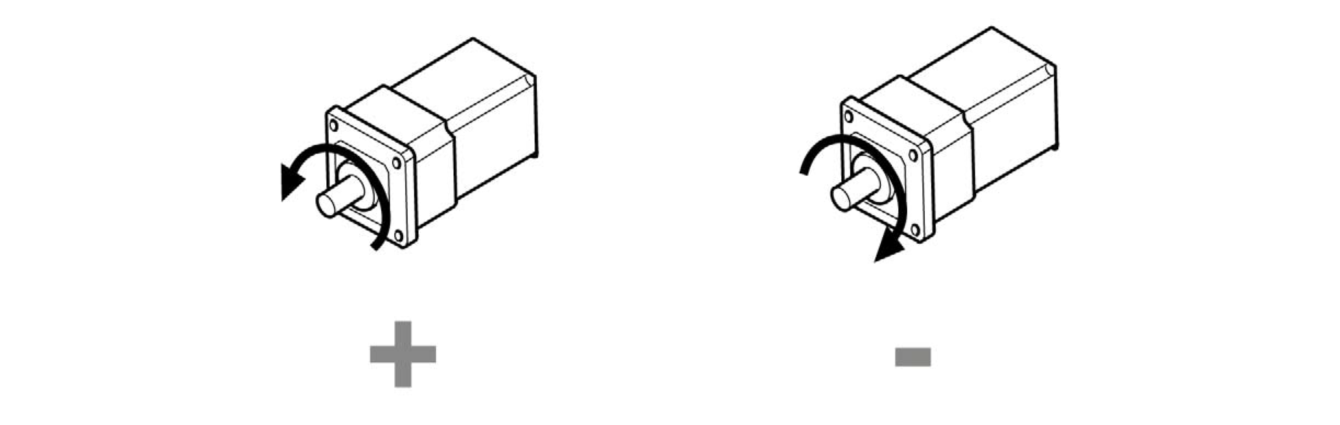
运动方向定义:看向突出的电机轴的末端时,如果电机轴逆时针方向旋转,则为正运动方向。
出厂设置时的运动方向:
服务热线:0371-60298207 13383812899
公司传真:0371-60298207
公司邮箱:nhauto@hnnhauto.com
公司地址:河南省新郑市薛店镇中德产业园47-4号楼
 官方微信公众号
官方微信公众号