本文来源于:施家邦 工控邦
Q11.LXM26/LXM28系列伺服报AL013,AL014,AL015如何处理?
LXM26/28伺服报AL013,LA014和AL015分别表示OPST(停止操作)触发,CWL(负极限限位)触发,CCWL(正极限限位)触发,如果在不使用上述功能的情况下,可以设置P2-15=0,P2-16=0,P2-17=0,断电重启后,即可解除该故障。
Q12.LXM26/28系列伺服选型需要选择哪些配件?
LXM26/28系列伺服选型需要如下配件:
以伺服驱动器LXM28AU10M3X搭配BCH2MM1023CF6C为例:
1.动力电缆一根,或者动力电缆接头一套用户自行制作电缆,例如电缆型号VW3M5D2FR30TK(3米带铠装电缆),或接头型号VW3M5D2F。
2.编码器电缆一根,或者编码器接头一套用户自行制作电缆,例如编码器电缆型号VW3M8D2AR30TK(3米带铠装电缆),或接头型号VW3M8D2A。
3. IO接线端子块(需要用到IO端子控制时选配),可以选择带0.5米电缆的端子台或端子接头自行制作电缆,带电缆的端子台型号为VW3M1C13,端子接头型号为VW3M1C12(3个/包出售)。
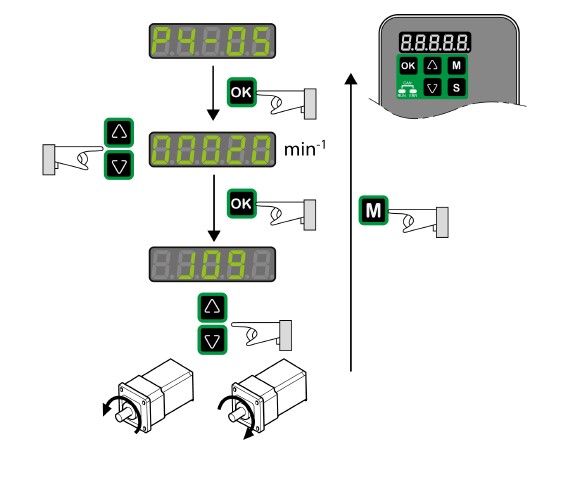
Q13.LXM26/28系列伺服如何点动?
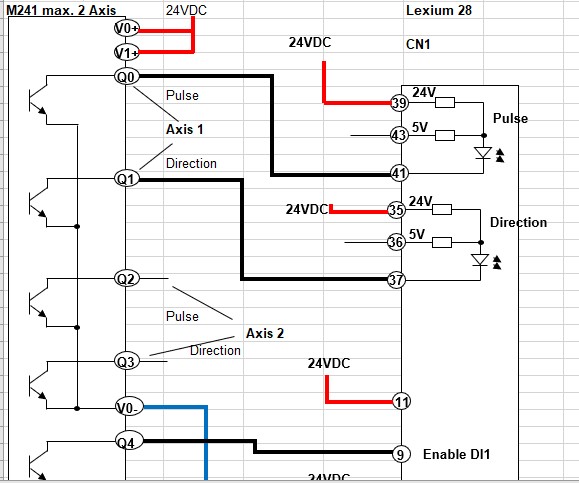
Q14.LXM26/28系列伺服PT模式如何接线?
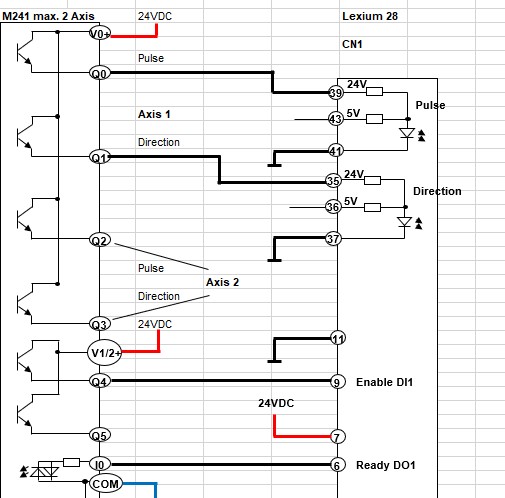
漏极接线如下:
Q15.LXM28A系列伺服CANopen通讯需要设置哪些参数?
LXM28A系列伺服在CANopen通讯时,需要设定以下参数:
1.P1-01=B,设置控制模式为CANopen。
2.P3-01的C位,CANopen通讯波特率,此参数需与主站配置一致,具体对应关系如下图:
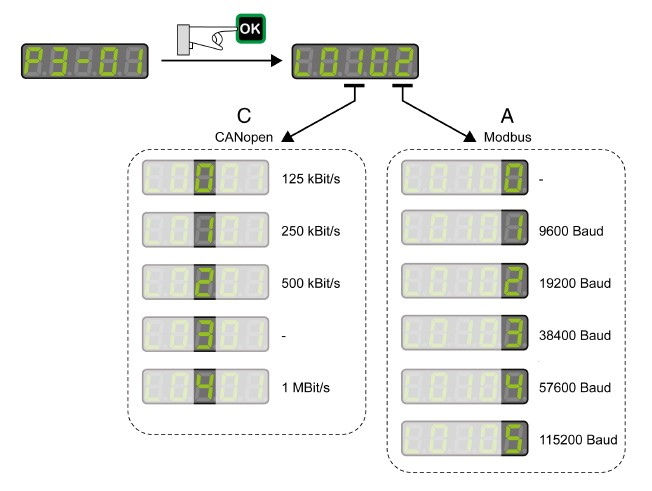
3.P3-05为CANopen站地址,此地址在一个CANopen网络中必须唯一,且必须与主站配置设置一致,注意,若不使用CANopen控制,建议将P3-05设置为0,避免报通讯错误或警告。
4. 通过通讯设置电子齿轮比,6091和6092,具体设置方法见问题4。
5.若不使用极限限位等功能,则将P2-15,P2-16,P2-17参数设置为0,若使用则需要接对应的DI端子。
Q16.LXM26/28系列伺服在PT模式需要设置哪些参数?
LXM26/28系列伺服PT模式需要设定的参数如下:
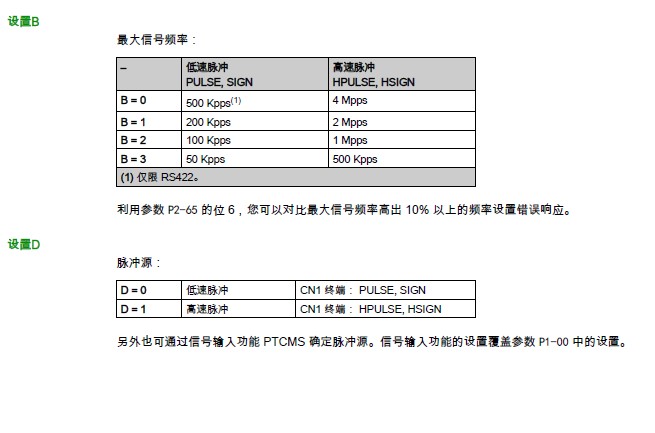
1.P1-00设置脉冲类型,例如脉冲加方向类型则将A位设置为2,AB相信号则将A位设置为0,C位用于设置脉冲是高电平有效还是低电平有效,0为高电平有效。
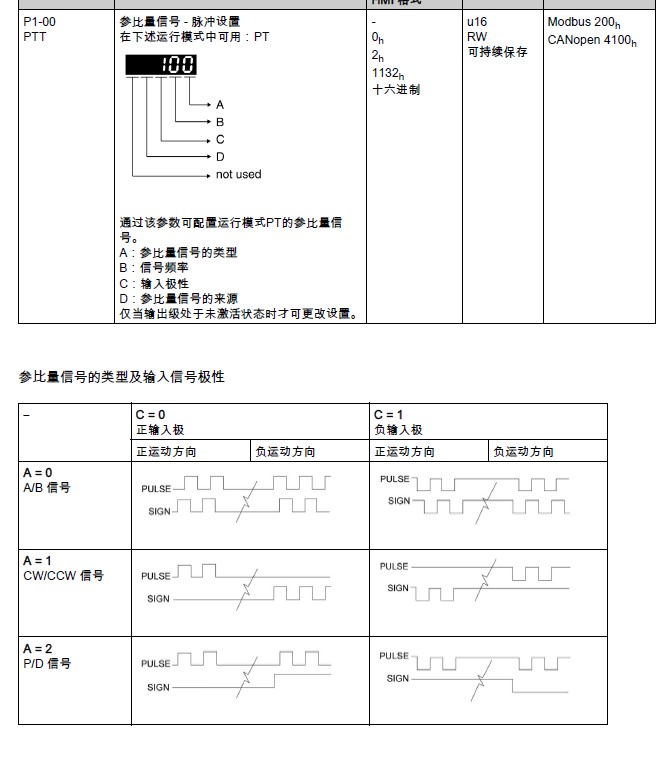
B位用于设置最大频率是多少,此参数与外部脉冲信号的最大频率相关,建议大于外部脉冲信号的最大频率,D位用于选择使用高速脉冲还是低速脉冲,这两种方式接线也不一样,通常默认低速脉冲。
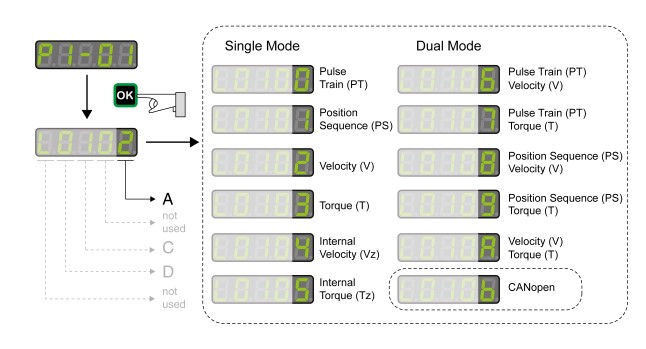
2.P1-01=0,表示使用PT模式,下表为LXM28A系列伺服的相关模式设置参数。
3.P1-44,P1-45设置电子齿轮比,具体设置方法见例4。
4.使能是外部使能还是内部使能,若为上电使能,则将参数P2-10和P2-68均设置为1,断电再上电后即可使能。
5.若不使用极限限位等功能,则将P2-15,P2-16,P2-17参数设置为0,若使用则需要接对应的DI端子。
Q17.LXM26/28系列伺服报AL508和WN701如何处理?
LXM26/28系列伺服报WN701表示驱动放大器过载(折返电流)已达到警告值,建议减小P1-24的值,直到驱动器不报警告。
LXM26/28系列伺服报AL508表示驱动放大器过载(折返电流)过载,建议减少P1-23的值,直到驱动器不报故障。
Q18.LXM26/28系列伺服如何在面板上监视伺服状态信息?
LXM26/28系列伺服使用面板监视伺服状态信息需要设置P0-02参数,具体参数值对应的功能如下:
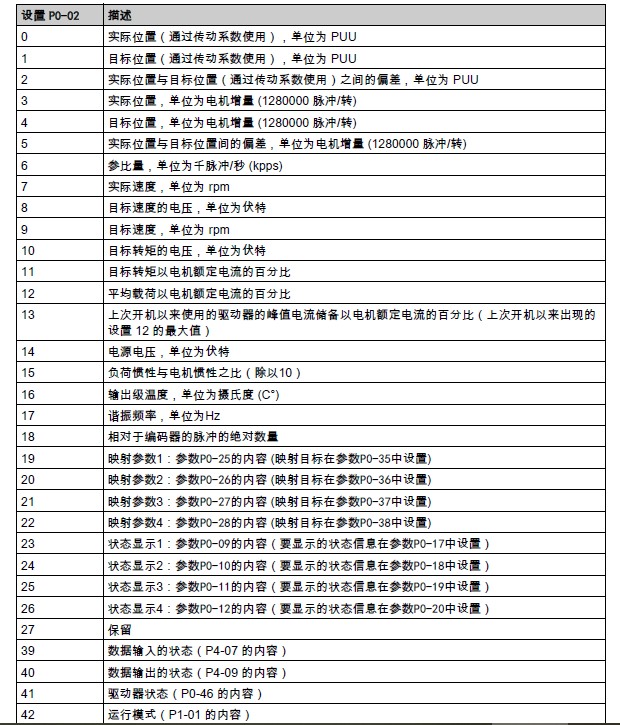
例如需要监视伺服的实际转速(单位为RPM),则需要将P0-02设置为7,点击OK后面板上显示的即为伺服的实际转速(单位为RPM)。
Q19.LXM26/28系列伺服如何强制数字量输入?
LXM26/28系列伺服强制数字量输入需要设定2个参数:
1.P3-06设置是否允许强制相关的DI,其中第0-7位对应数字量输入DI1-DI8,值0表示数字量输入不可以被强制,值1表示输入可以被强制。
2.P4-07设置是否强制相关DI,其中第0-7位对应数字量输入DI1-DI8,值0表示不强制相关输入,值1表示强制相关输入。
例如强制数字量输入1和数字量输入5,则需要将P3-06改为0X0011,2进制为00010001
表示允许强制数字量输入1和数字量输入5
P4-07设置为0X0011,二进制为00010001,表示强制数字量输入1和数字量输入5
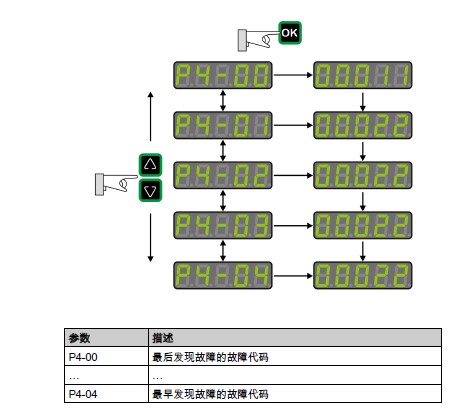
Q20.LXM26/28系列伺服如何查看历史故障?
参数P4-00到P4-04能读取最后的5个历史故障,通过P0-47可以读取最后的警告。
例如P4-04=3E1,表示此伺服最后一个故障为AL3E1,表示在执行绝对运动之前未执行回原点的动作。
往期回顾
上一篇:软起动器选型指南(一)
下一篇:配电房标准化怎么做?
服务热线:0371-60298207 13383812899
公司传真:0371-60298207
公司邮箱:nhauto@hnnhauto.com
公司地址:河南省新郑市薛店镇中德产业园47-4号楼
 官方微信公众号
官方微信公众号